

全國服務熱線
0755-23197339
0755-23197339
聯系人:肖經理
電話:0755-23197339
傳真:0755-29859300
手機:13828771664
地址:深圳市光明區公明街道上村社區蓮塘工業城B區第19棟101、第20棟
機械手應能按要求完成一系列動作,包括伸縮、回轉、升降、手腕動作等。 由于每一個液壓伺服系統的原理均相同,現僅以伸縮運動伺服系統為例,介紹其工作原理。
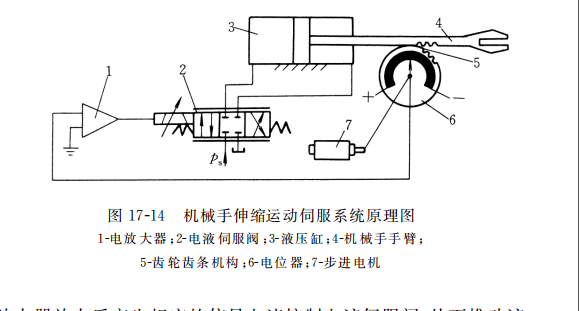
如圖17-14所示為機械手手臂伸縮運動電液伺服系統原理圖。系統主要由電放大器 1 、電液伺服閥 2 、液壓缸 3 、機械手手臂 4 、齒輪齒條機構 5 、電位器 6 和步進電機7 等元件 組成 。 指令信 號由 步進電機發出。 步進電機將數控裝置發出的脈沖信號轉換成角位移 ,其輸出轉角與輸入脈沖數成正比 ,輸出轉速與輸入脈沖頻率成正比。
步進電機的輸出軸與電位器的動觸頭連接。 電位器輸出的微弱電壓經放大器放大后產生相應的信號電流控制電液伺服閥,從而推動液壓缸產生相應的位移。其位移又通過齒條帶動齒輪轉動。由于電位器固定在齒輪上,因此 ,最終又使觸頭回到中位,從而控制機械手的伸縮運動。其工作過程如下:
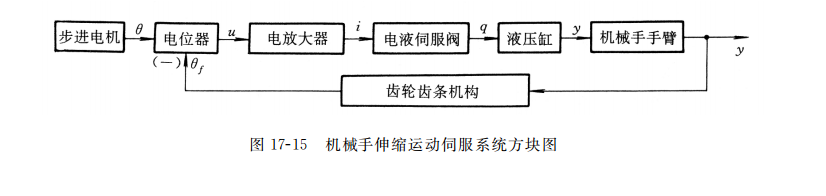
當數控裝置發出一定數量的脈沖時 ,步進電機就帶動電位器的動觸頭轉動,假定順時針轉過一定的角度 θ ,這時 ,電位器輸出電壓為 u ,經放大器放大后輸出電流i ,使電液伺服閥產生一定的開口量。 這時,電液伺服閥處于左位,壓力油進入液壓缸左腔,推動活塞帶動機械手手臂右移,液壓缸右腔回油經伺服閥流回油箱。 此時,機械手手臂上的齒條帶動齒輪也作順時針轉動 ,當轉到 θf = θ時 ,動觸頭回到電位器中位,電位器輸出電壓為零,放大器輸出電流也為零 ,電液伺服閥回到零位 ,沒有流量輸出 ,手臂即停止運動。當數控裝置發出反向脈沖時,步進電機逆時針方向轉動 ,機械手手臂縮回。如圖17-15所示為機械手手臂伸縮運動伺服系統方塊圖。




